

1. 서 론
2. 정착장 주면전단거동 분석
2.1 해석적 기법의 적용을 위한 다중선형모델의 개념
2.2 정착장 주면전단거동 분석을 위한 해석적 기법
3. 현장인발시험
3.1 시험앵커의 조건
3.2 현장 지반조건 및 그라우트 조건
3.3 현장 인발시험 결과
4. 결 론
1. 서 론
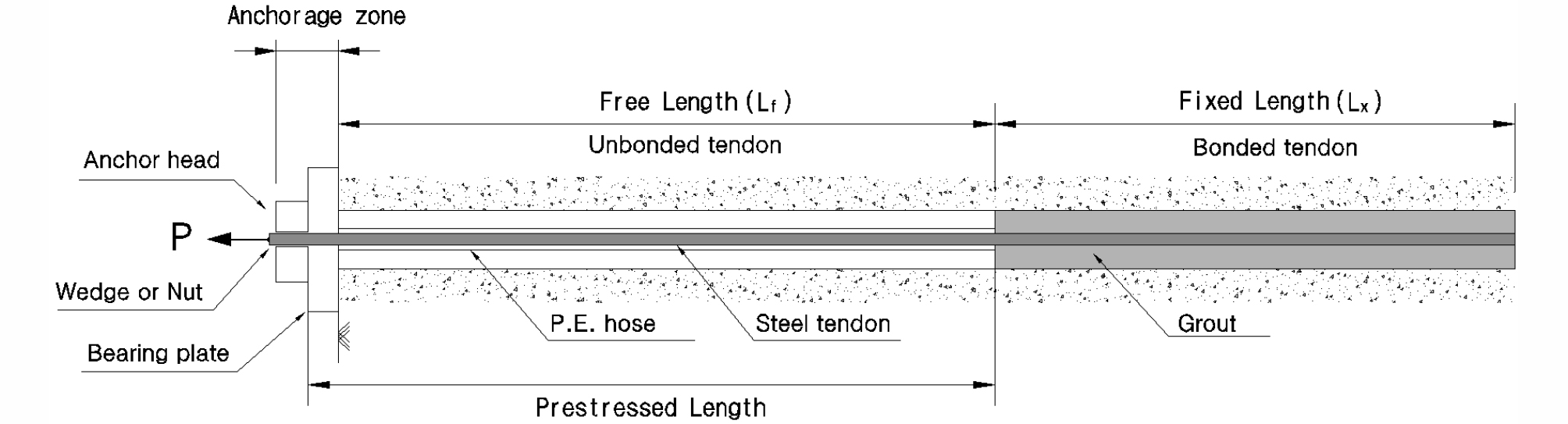
구조물 보강시 제한된 시공공간과 인접 구조물의 침해 제한 등으로 인해 지반앵커 공법의 적용사례가 점차 증가하는 추세이다(NEMA, 2011). 이러한 지반앵커의 구조는 Fig. 1에 나타낸 바와 같이 일반적으로 그라우트재와 주변지반과의 마찰저항이 발휘되는 정착장(fixed length, LX)과 정착장에서 발휘되는 응력을 앵커리지에 전달하는 자유장(free length, Lf), 그리고 자유장을 통해 전달된 응력을 고정시키는 앵커리지(anchorage)로 구성된다(Xanthakos, 1991; FHWA, 1999; Kim et al., 2016). 즉 지반앵커의 원활한 하중 수행능력이 발휘되기 위해서는 위와 같이 3가지 구조부의 안정성이 확보되어야 한다. 자유장은 Fig. 1에 나타낸 바와 같이 인장재가 주변 P.E호스로 보호되어 있는 구조로 천공홀에 그라우트 주입시에도 주변그라우트와 부착되지 않는 반면, 정착장은 그라우트 주입으로 인해 인장재와 그라우트의 부착, 그리고 그라우트와 주변지반과의 정착으로 인발하중에 저항하게 된다. 따라서 단일재료의 인장재(steel tendon)가 사용되는 자유장의 거동예측은 비교적 쉬운 편이다. 그러나 지반앵커의 정착장은 인장재와 그라우트 그리고 주변 지반과의 상호 역학적 관계에 크게 의존하는 관계로 이를 고려한 정착장의 거동 예측은 비교적 쉽지 않은 편이다. 따라서 정착장의 거동예측을 위해서는 정착장을 구성하는 각 재료적 특성과 주변지반과의 상호 역학적 관계에 대한 규명이 매우 중요하다.
정착장 거동예측을 위한 대표적인 시험은 Ostermayer and Scheele(1977)에 의해 실시되었다. 이들은 인장형 앵커를 대상으로 정착장에 작용하는 전단응력 특성을 지반조건과 정착장 길이별로 분석하였다. 분석결과 현장시험에 의한 전단응력의 분포는 매우 비선형적이고 비균등한 관계임을 제시하였고 이러한 특성은 이후 해외 많은 연구결과들을 통해서도 확인되었다(Littlejohn, 1980; Ivering, 1981; Barley, 1995; Martirosyan et al., 2016). 또한 국내에서도 인장형 앵커에 대한 많은 실험적인 결과와 해석적인 방법이 논의되었다(Kim, 2001; Kim et al., 2004; Sung, 2012; Kim et al., 2014; Jeong et al., 2017). 즉 지반앵커에 대한 국내외 대부분의 연구사례는 정착장에 작용하는 정착응력 분포 특성이 매우 비선형적인 관계임을 나타내고 있다. 그러나 정착장의 거동분석을 위한 이러한 연구 자료는 실무적으로 적용함에 있어 매우 복잡하고 특히 모든 시공조건을 고려함에 있어 한계가 있는 관계로 현재 대부분의 관련 기준서에는 편의상 “일정한 주면전단응력분포” 또는 “일정한 정착응력” 등으로 가정하고 있다. 이러한 “가정”의 근본적인 원인은 앵커 주면전단응력 발현에 대한 공학적인 메카니즘이 비교적 복잡하고 또한 지반앵커를 설계함에 있어 다양한 지반조건 및 비선형적 주면전단거동을 포괄적으로 모사하는데 어려움이 있기 때문이다. 따라서 본 연구에서는 정착장 주면의 응력분포특성을 예측함에 있어 기존의 “일정한 응력값으로 가정” 하는 방법을 좀 더 개선하고 또한 정착장 주면의 응력분포 특성 분석이 가능한 해석적 모델을 제안하고자 한다. 즉 국내외에서 보편적으로 많이 사용되고 있는 인장형 앵커를 대상으로 풍화토 지반조건의 현장 인발시험을 수행한 후, 시험결과에 부합되는 다중선형 슬립전단모델(multi-linear slip shear model, 이하 다중선형모델)의 수식적 표현을 제시하고 이를 이용하는 해석적 기법을 제안하였다. 제안된 해석적 모델 및 해석적 기법의 적용성 및 유효성을 검토하기 위하여 현장 인발시험 결과와 비교, 검토함으로써 인장형 앵커의 전반적인 거동을 분석하였다.
2. 정착장 주면전단거동 분석
2.1 해석적 기법의 적용을 위한 다중선형모델의 개념
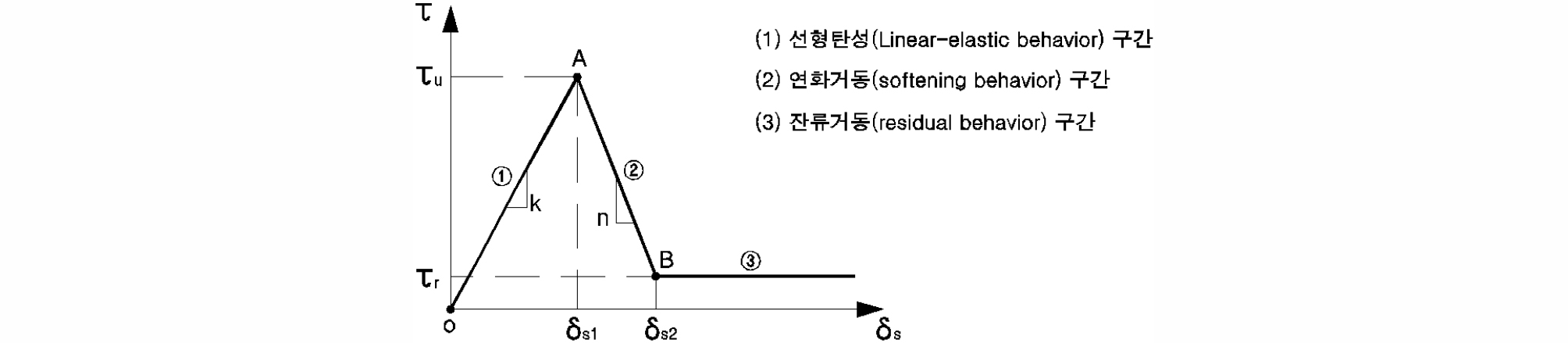
Benmokrane, et al.(1995)은 축소모형시험(정착장 LX=110mm 조건)을 통해 앵커 정착장에 작용하는 주면전단응력(𝜏)과 슬립(slip, 𝛿s)의 관계가 다중선형적임을 제안하였다. 즉 Fig. 2에 나타낸 바와 같이 정착장 주면에서의 𝜏-𝛿s 관계는 크게 3구간으로 구분되는데, 먼저 (1)구간은 선형탄성(linear elastic) 구간을 나타내는 것이며 최대(peak) 응력인 A점(𝛿s1, 𝜏u)까지 양(+)의 기울기로 거동함을 나타낸다. 이후 (2)구간은 극한주면전단응력(𝜏u) 발현이후 주면전단응력이 점차 감소되는 연화(softening)구간을 나타내며, 마지막으로 (3)구간은 전단응력이 최소값으로 수렴되는 잔류(residual)구간을 나타낸다. 즉 B점(𝛿s2, 𝜏r) 이후 𝛿s>𝛿s2 조건에서는 𝜏=𝜏r로 수렴됨을 의미하며 이러한 다중선형적 관계를 각 구간별 수식적 관계로 표현하면 다음과 같다.
| $$① 선형탄성(linear elastic) 구간: r=\mathrm m\cdot{\mathrm\delta}_\mathrm s$$ | (1) |
| $$③ 잔류응력(residualstress)구간: \tau=\tau_\mathrm r$$ | (3) |
여기서, m(MN/m3)은 선형탄성구간의 기울기이며, n (MN/m3)과 h(MN/m3)는 각각 연화구간의 기울기와 절편값을 나타낸다.
따라서 본 논문에서는 Benmokrane et al.(1995)에 의해 제안된 𝜏-𝛿s 관계 즉 다중선형모델을 이용하여 정착장 거동을 분석하고자 하며 본 모델을 이용하기 위한 각 변수들은 실규모 현장인발시험으로부터 도출하였다.
정착장의 경계면 즉 그라우트와 외부 주변지반 접촉면에서의 슬립은 인장재 및 그라우트 조건, 지반조건 등의 다양한 요인에 영향을 받으므로 Fig. 2에 나타낸 다중선형모델을 적용하기 위해서는 다음과 같은 기본적인 가정 사항이 요구된다.
첫째, 앞서 설명한 바와 같이 그라우트-지반과의 경계면에서의 슬립이 어떤 한계값(limit slip, 𝛿s2)이상 초과하게 된다면 주면전단응력은 잔류응력(residual stress) 조건으로 수렴됨을 가정하는데 이에 대한 설정 근거는 다음과 같다.
먼저 천공홀내 그라우트 주입시에는 어느 정도의 주입압이 반영되기 때문에 그라우트와 주변지반 경계면에서의 압착력(gripping force)이 발생하게 된다. 즉 이로 인해 정착장 주면의 법선응력(normal pressure)이 어느 정도 증가함에 따라 정착장 인발후에도 경계면에서는 어느 정도의 정착응력이 잔존함을 가정한다.
둘째, 그라우트와 주변지반 경계면에서 발생하는 전단응력의 저감현상은 인장재와 그라우트 경계면에서 발생하는 부착응력의 저감현상이 발생하기에 앞서 선행적으로 발생함을 가정한다. 이는 일반적으로 연암 이하 지반조건에서는 충분히 타당한 개념이다(Farmer, 1975; Xanthakos, 1991; FHWA, 1999; BS 1237, 2000). 즉 이러한 가정은 강연선으로 구성된 인장재와 그라우트가 상호 일체적으로 거동함에 따라 정착장의 극한인발하중 도달시에도 인장재가 어떤 파단이나 뽑힘이 발생하지 않음을 의미한다.
셋째, 인장형 앵커의 작용하중은 정착장 시작점부터 선행적으로 작용하는 것으로 가정한다(Fig. 1 참조) 즉 이로 인해 정착장의 슬립(slip)은 정착장 시작점부터 발생하게 되고, 이에 상응하는 주면전단응력 또한 정착장 시작점부터 발생함을 가정한다. 이러한 가정은 축방향 인발 하중이 점차 증가하게 되면 정착장 시작점부터 전단응력이 증가하면서 슬립이 발생하게 되고 동시에 축방향으로 변위가 증가함을 의미한다. 또한 지반앵커의 주면전단응력이 발휘되기 위해서는 어느 정도의 축변위가 발생해야 한다는 자명한 사실에 근거한다(Ostermayer et al., 1977; Xanthakos, 1991). 즉 이러한 가정사항은 인장형 앵커의 하중전이 시스템을 고려한다면 충분히 타당한 개념일 것이다. 따라서 본 논문에서는 이러한 가정들과 현장인발시험결과를 통해서 다중선형모델의 각 변수를 결정하였다.
2.2 정착장 주면전단거동 분석을 위한 해석적 기법
다중선형모델을 이용하여 정착장의 거동을 분석하기 위해서는 기본적인 지배방정식의 설정이 필요하다. 따라서 현장시험 조건에 부합되는 기본적인 지배방정식을 다음과 같이 유도하였다.
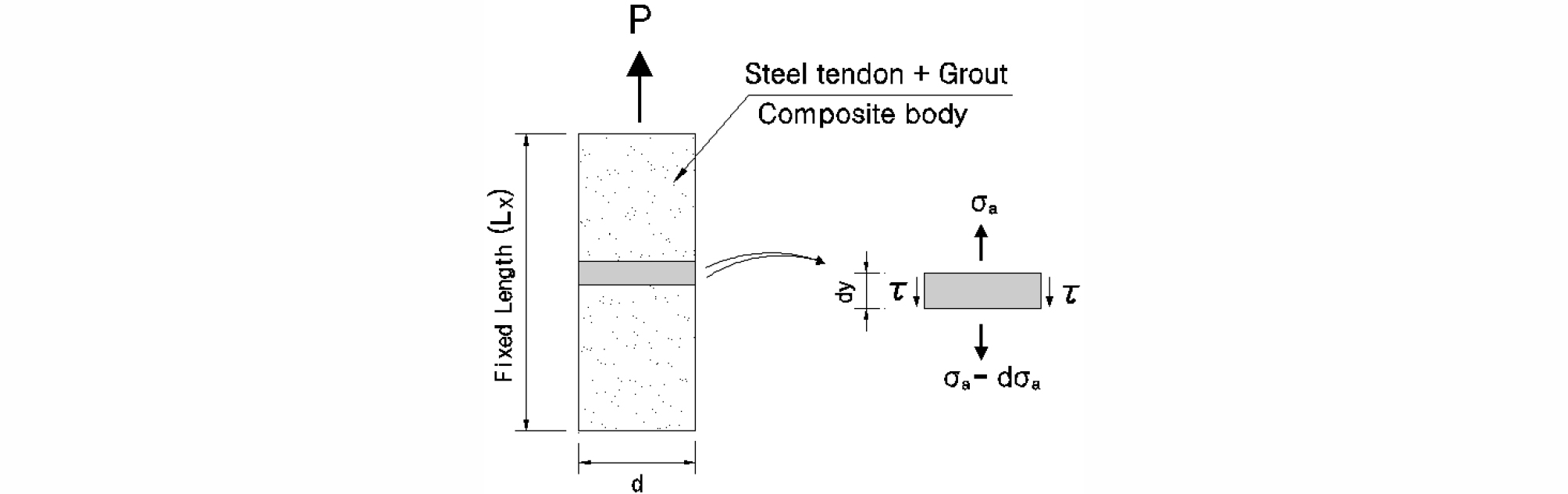
지반앵커의 정착장(LX)을 Fig. 3과 같이 가정하고 정착장에 작용하는 축응력과 힘의 평형관계를 이용하면 다음과 같은 관계가 성립된다.
| $$\frac{{\mathrm{dσ}}_\mathrm a}{\mathrm{dy}}-\frac{4\cdot\tau}{\mathrm d}=0\;\:\mathrm{또는}\;\tau\mathit=\frac{\mathrm d}4\frac{{\mathrm{dσ}}_\mathrm a}{\mathrm{dy}}$$ | (4) |
여기서, 𝜎a는 정착장 임의의 깊이에 작용하는 축응력을 나타내며, 𝜏는 정착장 주면전단응력, d는 정착장(fixed length)의 직경을 나타낸다.
한편 식 (4)와 Fig. 2를 이용하면 주면전단응력(𝜏)과 슬립(𝛿s)의 관계를 각 경계면 조건별로 다음과 같이 나타낼 수 있다.
2.2.1 선형탄성 𝜏-𝛿s 거동 조건
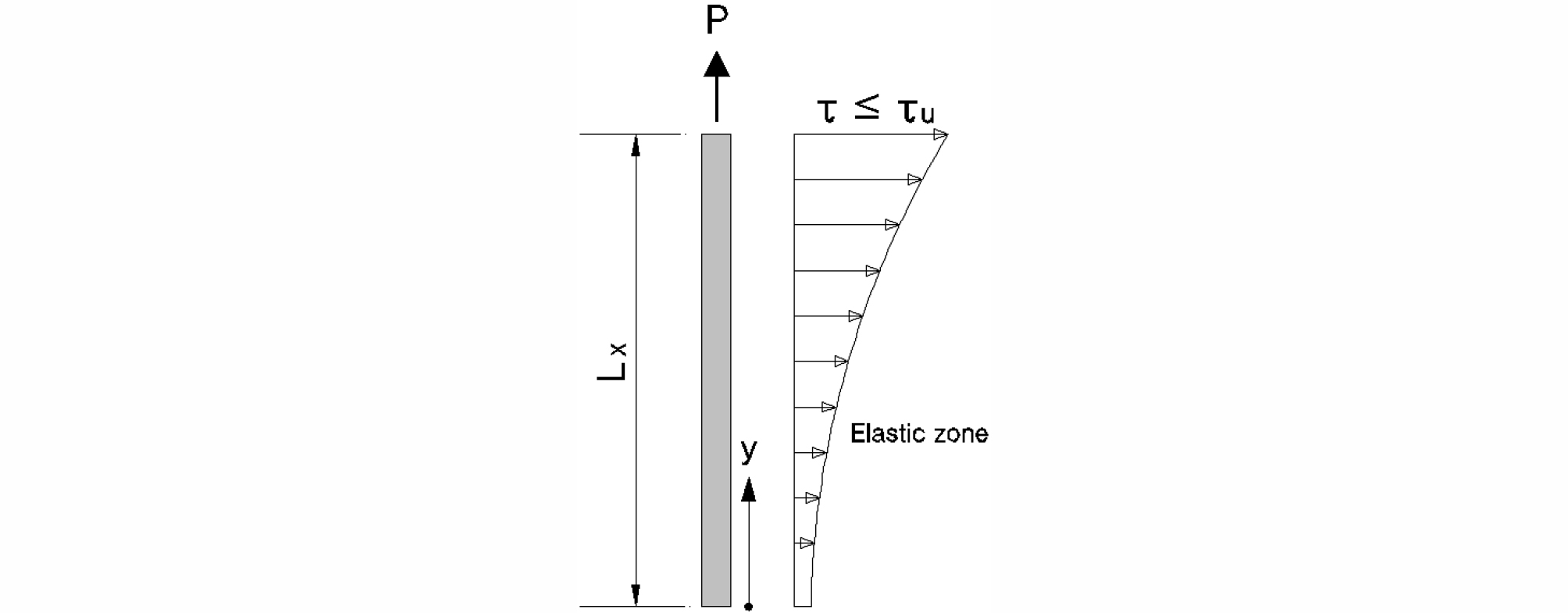
연직방향으로 설치된 인장형 앵커의 정착장에 인발하중(P)이 작용하게 된다면 정착장 시작점(y=LX)에서 정착장 끝점(y=0)까지의 전단응력 분포는 Fig. 4와 같다고 가정한다. 이러한 거동 조건은 인발하중(P)이 비교적 작은 조건을 나타낸 것으로 이때 전단응력(𝜏)과 슬립(𝛿s)의 관계는 선형탄성조건임을 나타낸다(Fig. 2의 ①구간 참조).
본 경계면 조건에서 𝜏-𝛿s 관계에 대한 지배방정식은 식 (1)과 식 (4)의 양변을 각각 y에 대하여 미분하여 정리하면 다음과 같이 나타낼 수 있다.
| $$\frac{\mathrm d\tau}{\mathrm{dy}}=\mathrm m\frac{{\mathrm{dδ}}_s}{\mathrm{dy}}=\mathrm m\frac{\sigma_\mathrm a}{{\mathrm E}_\mathrm a}$$ | (5) |
| $$\frac{\mathrm d\tau}{\mathrm{dy}}=\frac{\mathrm d}4\frac{\mathrm d^2{\mathrm\sigma}_\mathrm a}{\mathrm{dy}^2}$$ | (6) |
따라서 식 (5)=식 (6) 관계를 이용하면 다음과 같다.
| $$\frac{\mathrm d^2{\mathrm\sigma}_\mathrm a}{\mathrm{dy}^2}-\mathrm\alpha^2\cdot{\mathrm\sigma}_\mathrm a=0$$ | (7) |
여기서
| $$\mathrm\alpha^2=\frac{4\mathrm m}{{\mathrm E}_\mathrm a\cdot\mathrm d}$$ | (8) |
한편 식 (7)은 상수계수를 갖는 2차 제차미분방정식이므로 본 식의 일반해는 식 (9)와 같고, 이는 정착장 임의의 깊이에서 작용하는 축응력을 나타낸다.
| $$\sigma_\mathrm a={\mathrm c}_1\cdot\mathrm e^\mathrm{αy}+{\mathrm c}_2\cdot\mathrm e^{-\mathrm{αy}}$$ | (9) |
식 (9)에서 미지수 c1과 c2는 Fig. 4의 경계조건 즉, y=0에서 𝜎a=𝜎a0조건과 y=LX에서 인발하중(P) 작용조건을 고려하면 다음과 같이 나타낼 수 있다.
| $${\mathrm c}_1\frac{-\sigma_{\mathrm a0}\cdot\mathrm e^{-\mathrm{αL}}+{\displaystyle\frac{4\mathrm P}{\mathrm{πd}^2}}}{\mathrm e^\mathrm{αL}-\mathrm e^{-\mathrm{αL}}}$$ | (10) |
| $${\mathrm c}_2\frac{-\sigma_{\mathrm a0}\cdot\mathrm e^{-\mathrm{αL}}+{\displaystyle\frac{4\mathrm P}{\mathrm{πd}^2}}}{\mathrm e^\mathrm{αL}-\mathrm e^{-\mathrm{αL}}}$$ | (11) |
여기서 𝜎a0는 정착장 끝점(y=0)에서 발생하는 축응력을 나타낸다.
또한 식 (4)와 식 (9)를 이용하면 정착장 임의의 깊이에서 작용하는 주면전단응력은 식 (12)와 같이 나타낼 수 있다.
| $$\mathrm\tau=\frac{\mathrm\alpha\cdot\mathrm d}4({\mathrm c}_1\cdot\mathrm e^\mathrm{αy}-{\mathrm c}_2\cdot\mathrm e^{-\mathrm{αy}})$$ | (12) |
즉 식 (10)과 식 (11)에 나타낸 미지수 c1과 c2을 식 (9)와 식 (12)에 각각 적용하면 정착장 임의의 깊이에 작용하는 축응력과 전단응력을 구할 수 있게 된다.
한편, 임의의 깊이에서 전단응력(𝜏)과 인발하중(P)과의 관계는 식 (12)에 식 (10)과 식 (11)을 대입한 후 인발하중(P) 항으로 정리하면 다음과 같이 나타낼 수 있다.
여기서 인발하중(P)의 증가로 선형탄성거동 조건의 최대인발하중, 즉 y=LX에서 초기 연성거동을 보이기 시작하는 초기임계하중을 Pini라고 한다면 이때의 Pini값은 𝜏y=L=𝜏u일 때 발생하므로 식 (13)에 y=LX 조건을 대입하여 정리하면 다음과 같다.
2.2.2 선형탄성-연화 𝜏-𝛿s 거동 조건
선형탄성 경계면 조건에서 인발하중(P)이 계속해서 증가하여 정착장 시작점(y=LX)에서 P>Pini이 된다면 시작점에서는 주변지반과의 부분적인 연화(softening)거동이 발생되지만 정착장 끝점(y=0)에서는 여전히 탄성거동으로 잔류함을 가정한다. 즉 이러한 거동 조건은 인발하중(P)이 선형탄성조건보다 비교적 큰 조건에서 발생하며 이때 전단응력(𝜏)과 슬립(𝛿s)의 관계는 2종류의 경계면 조건으로 나타냈다(Fig. 2의 ①구간과 ②구간 참조).
한편 인발하중(P)의 증가로 P>Pini이 된다면 정착장 시작점부터 부분적인 연화거동을 하게 되며 이때 연화구간길이를 “Ls”로 설정하면 탄성구간은 y=0~(L-Ls)이 된다. 이러한 관계를 도식적으로 표현하면 Fig. 5와 같다.
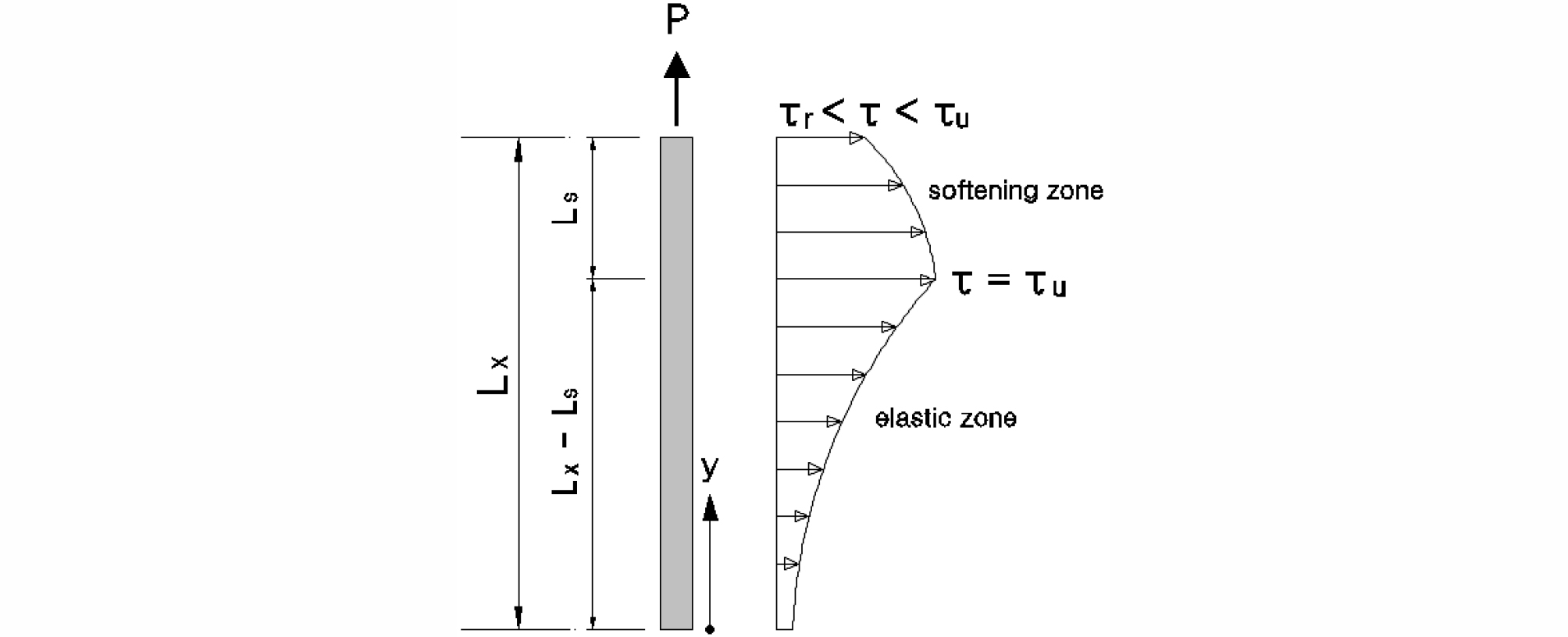
Fig. 5에서 선형탄성구간의 축응력과 주면전단응력은 식 (9)와 식 (12)의 관계를 적용하면 각각 다음과 같이 나타낼 수 있다.
| $${\mathrm\sigma}_\mathrm a={\mathrm c}_3\cdot\mathrm e^\mathrm{αy}+{\mathrm c}_4\cdot\mathrm e^{-\mathrm{αy}}$$ | (15) |
| $$\mathrm\tau=\frac{\mathrm\alpha\cdot\mathrm d}4\left[{\mathrm c}_3\cdot\mathrm e^\mathrm{αy}-{\mathrm c}_4\cdot\mathrm e^{-\mathrm{αy}}\right]$$ | (16) |
여기서, c3값과 c4값은 식 (10)과 식 (11)을 참조하여 각각 다음과 같이 나타낼 수 있다.
한편 인장형 앵커는 인발하중이 정착장 시작점에서부터 작용하는 관계로 Fig. 5에 나타낸 바와 같이 연화(softening)구간은 y=(LX-Ls)~LX에 해당한다. 즉 연화구간의 𝜏-𝛿s 관계식은 식 (2)와 같고 이를 양변 미분하여 정리하면 식 (19)와 같이 나타낼 수 있다.
| $$\frac{\mathrm{dτ}}{\mathrm{dy}}=-\mathrm n\frac{{\mathrm{dδ}}_\mathrm s}{\mathrm{dy}}=-\mathrm n\frac{{\mathrm\sigma}_\mathrm a}{{\mathrm E}_\mathrm a}$$ | (19) |
또한 식 (19)와 식 (4)를 이용하면 연화구간의 지배방정식은 식 (20)과 같이 나타낼 수 있다.
| $$\frac{\mathrm d^2{\mathrm\sigma}_\mathrm a}{\mathrm{dy}^2}+\beta^2\mathit\cdot\sigma_\mathit a\mathit=\mathit0$$ | (20) |
| $$\beta^2=\frac{4\mathrm n}{{\mathrm E}_\mathrm a\cdot\mathrm d}$$ | (21) |
위의 식 (20)은 상수계수를 갖는 2차 제차미분방정식이므로 본 식의 일반해는 식 (22)와 같고, 이는 정착장 임의의 깊이에 작용하는 축응력을 나타낸다.
| $$\sigma_a=c_5\cdot\cos(\beta y)+c_6\cdot\sin(\beta y)$$ | (22) |
또한 식 (4)와 식 (22)로부터 정착장 임의의 깊이에서 작용하는 주면전단응력은 다음과 같다.
| $$\tau=\frac{\mathrm d\beta}4\left[-c_5\cdot\sin\left(\beta y\right)+c_6\cdot\cos(\beta y)\right]$$ | (23) |
여기서, 두 개의 미지수 c5와 c6은 다음과 같은 경계조건을 이용하여 구하게 된다. 즉 y=LX-Ls에서 연화구간과 탄성구간의 연속성 조건을 만족해야 하므로 식 (15)와 식 (22)는 서로 같아야 하며, 또한 y=LX-Ls에서 식 (23)은 “𝜏u”값에 도달함을 가정한다. 즉 이러한 두 개의 경계조건을 이용하면 미지수 c5와 c6은 각각 식 (24)와 식 (25)와 같이 나타낼 수 있다.
여기서 이다.
한편, 시작점(y=LX)에서 인발하중(P)는 식 (22)를 이용하여 다음과 같이 나타낼 수 있다.
| $$\mathrm P(=\mathrm A\cdot{\mathrm\sigma}_\mathrm a)=\frac{\mathrm{πd}^2}4\left[{\mathrm c}_5\cdot\cos(\beta{\mathrm L}_\mathrm x)+{\mathrm c}_6\cdot\sin(\beta{\mathrm L}_\mathrm x)\right]$$ | (26) |
또한 선형탄성-연화거동 조건에서의 최대인발하중(Pmax)은 식 (26)에서 조건으로 구할 수 있으며 이를 만족하는 Ls=Lsc라 하면 이 Lsc값과 식 (26)을 이용하면 선형탄성-연화 거동조건의 최대인발하중(Pmax)을 구할 수 있게 된다.
2.2.3 선형탄성-연화-잔류 𝜏-𝛿s 거동 조건
선형탄성-연화 거동 이후 인발하중(P)이 계속해서 증가하여 정착장 시작점(y=LX)에서 P>Pmax이 된다면 시작점 주변지반에서는 부분적인 인발이 발생하게 되며 이로 인해 잔류전단응력만이 작용함을 가정한다면 정착장 주면에서는 3종류의 경계면 거동이 존재하게 된다(Fig. 2의 ①구간과 ②구간, ③구간 참조). 이러한 관계를 도식적으로 표현하면 Fig. 6과 같다.
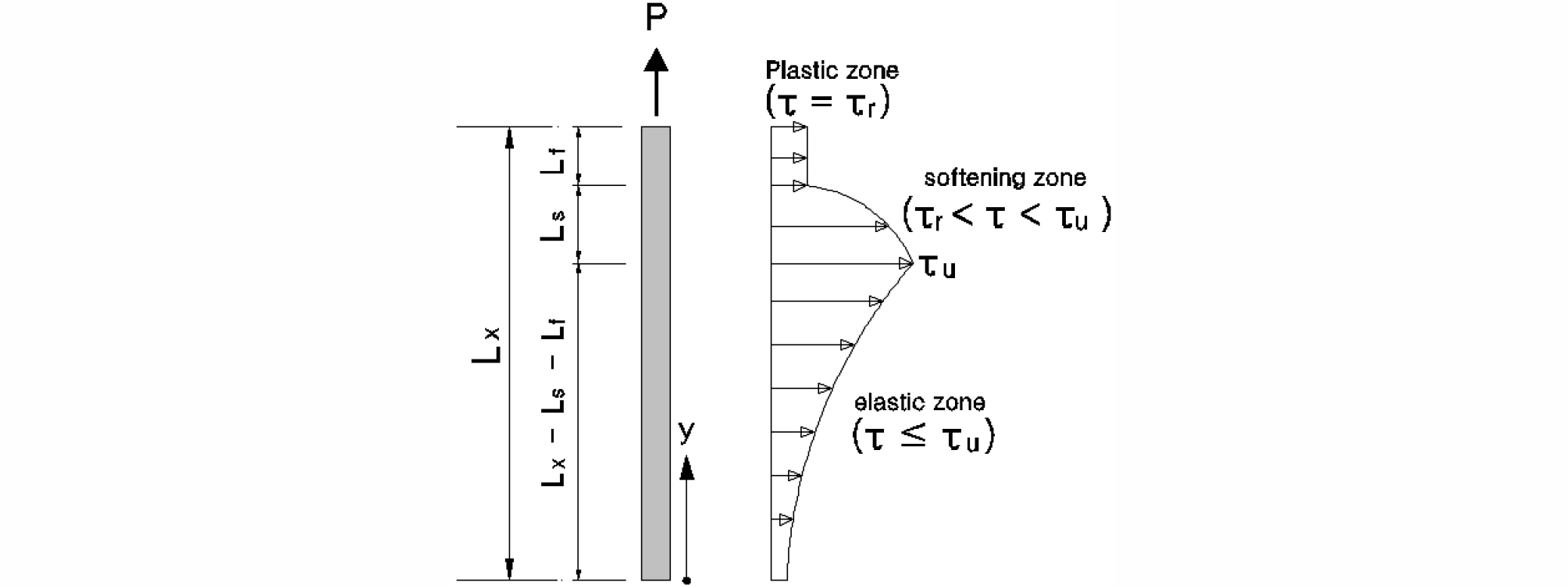
즉 Fig. 6에 나타낸 바와 같이 잔류전단응력 발생구간을 “Lsf”로 가정하고, 잔류전단응력 하부구간부터 부분적인 연화거동을 하게 되는 구간길이를 “Ls”로 가정한다면 탄성구간은 y=0~(Lx-Ls-Lf)가 된다. 따라서 탄성구간에 대한 축응력과 주면전단응력은 식 (15)와 식 (16)을 이용하여 각각 다음과 같이 나타낼 수 있다.
| $${\mathrm\sigma}_\mathrm a={\mathrm c}_7\cdot\mathrm e^\mathrm{αy}+{\mathrm c}_8\cdot\mathrm e^{-\mathrm{αy}}$$ | (27) |
| $$\mathrm\tau=\frac{\mathrm\alpha\cdot\mathrm d}4\left[{\mathrm c}_7\cdot\mathrm e^\mathrm{αy}-{\mathrm c}_8\cdot\mathrm e^{-\mathrm{αy}}\right]$$ | (28) |
또한 c7값과 c8값은 식 (17)과 식 (18)을 이용하여 다음과 같이 나타낼 수 있다.
연화구간은 y=(LX-Ls-Lf)~(LX-Lf)에 해당하는 구간으로서 본 구간은 정착장의 탄성거동 구간과 잔류거동 구간의 경계가 되는 구간이다. 따라서 이를 고려한 정착장의 축응력과 주면전단응력은 식 (22)와 식 (23)을 이용하여 다음과 같이 각각 나타낼 수 있다.
| $${\mathrm\sigma}_\mathrm a=c_9\cdot\cos\left(\beta\mathrm y\right)+{\mathrm c}_{10}\cdot\sin(\beta\mathrm y)$$ | (31) |
| $$\mathrm\tau=\frac{\mathrm d\beta}4\left[-{\mathrm c}_9\cdot\sin\left(\beta\mathrm y\right)+{\mathrm c}_{10}\cdot\cos\left(\beta\mathrm y\right)\right]$$ | (32) |
이때 c9와 c10은 연화구간과 선형탄성 구간의 연속성 조건을 고려한다면 식 (24)와 식 (25)와 유사하게 다음과 같이 나타낼 수 있다.
여기서, 이다.
마지막으로 잔류거동(residual Behavior)구간은 y=(LX-Lf)~LX에 해당하는 구간으로 정착장 인발로 인해 잔류응력이 발생하는 구간을 나타낸다. 따라서 이를 고려한 지배방정식은 식 (4)를 적분하고 LX-Lf≤y≤Lx 구간의 잔류응력 𝜏=𝜏r을 고려하면 다음과 같아 나타낼 수 있다.
| $${\mathrm\sigma}_\mathrm a=\frac{4{\mathrm\tau}_\mathrm r}{\mathrm d}\mathrm y+{\mathrm c}_{11}$$ | (35) |
여기서 c11값은 y=LX-Lf에서 연화구간과 잔류구간의 연속성 조건을 고려하여 식 (36)과 같이 나타낼 수 있다.
따라서 식 (35)와 식 (36)을 이용하면 잔류구간의 축응력을 구할 수 있으며 이때 주면전단응력 𝜏=𝜏r이 된다.
3. 현장인발시험
현장 인발시험을 위한 정착장의 지반조건은 극한주면전단응력이 700kPa이하인 풍화토 조건으로 설정하였다. 그 이유는 앵커 인발시 정착장의 인발을 사전 유도함으로써 정착장 내부 인장재의 파단이나 뽑힘을 방지하기 위함이다(Littlejohn, 1980; BS 8081, 1989). 앵커 정착장이 완전히 인발하기 이전에 인장재의 파단을 방지함으로써 최대인발하중의 크기를 예측하고 이에 따라 정착장에 작용하는 응력특성을 분석하였다.
본 앵커 시험은 OO복선전철 현장에서 실시하였으며 앵커시험방법은 FHWA(1999) 기준과 PTI(2004)기준에서 제시된 인발성능시험(performance tests)을 준용하였다. 시험방법에 근거하여 앵커 인장재와 정착 구조체(앵커헤드 및 지압판 등)의 정렬, 배치하기 위한 정렬하중(Pal, alignment load)은 잭킹압력 𝜎j=5.0MPa에 해당하는 Pal=52.9kN을 적용하였으며 이후 각 하중 단계별로 재하(loading) 및 제하(unloading)를 실시하여 이에 대한 변위를 각각 측정하였다. 또한 재하이후에는 Pal로 제하시키고 다시 추가 하중을 반영하여 다음 시험 하중까지 재재하(reloading)하였다. 이렇게 반복되는 재하(loading)-제하(unloading)-재재하(reloading)의 과정을 최종 목표하중까지 실시하였으며 각 하중단계별로 앵커리지 부근의 변위를 측정하였다. 적용된 최종 목표하중은 인장재의 항복강도(fy)이내에서 설정하였다.
3.1 시험앵커의 조건
현장시험을 위한 시험 앵커체는 Fig. 7에 나타낸 바와 같이 직경 12.7mm의 스트랜드로 구성된 인장재 5가닥을 사용하였으며, 최대인발하중은 앵커 강연선의 항복하중(780kN)이내에서 정착장의 슬립(slip)이 발생 가능하도록 계획하였다. 여기서 시험 앵커에 사용한 인장재와 앵커제원을 각각 Table 1과 Table 2에 나타내었다.

Table 1. Nominal dimension and physical properties of strand tendon for pull-out test
| Tendon type | Nominal diameter (mm) | Nominal cross section (mm2) | Weight per unit length (kN/m) | Yield tensile load per strand (Pa, kPa/ea) |
| PC 7-wire strand | 12.7 | 98.71 | 7.59×10-3 | 156.0 |
Notes.1 : Standard for wire strand type refers to KS D 7002
Table 2. Dimension of test anchors for pull-out test
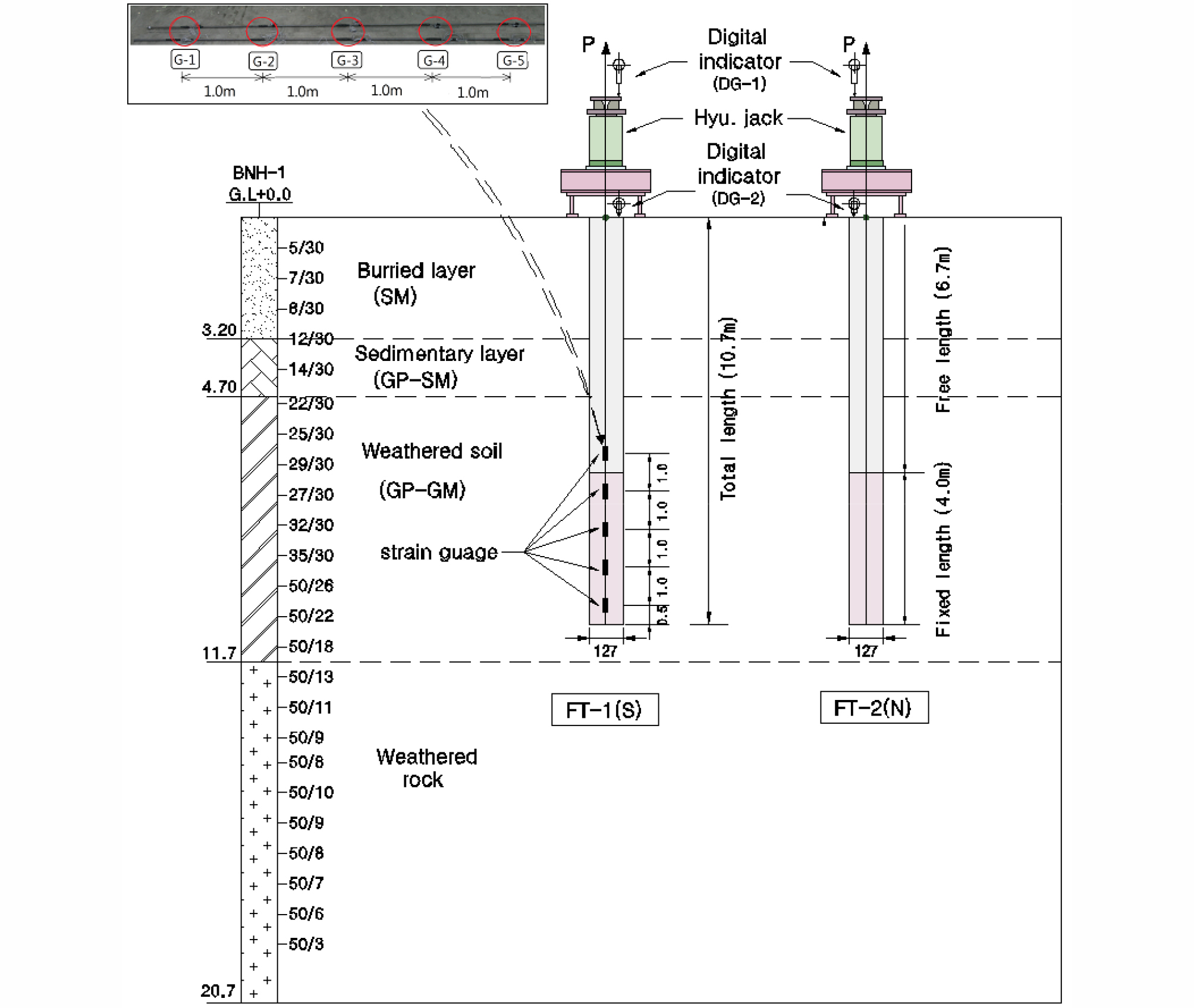
Table 2에 나타낸 바와 같이 FT-1(S)시험앵커는 최대인발하중과 각 인발하중에 대한 정착장의 응력 특성을 확인하기 위한 것으로 변형률게이지는 2가닥의 인장재에 각각 1.0m 간격으로 5개소씩 총 10개소를 부착하였다(Fig. 10 참조). 이때 본 실험에 적용된 변형률게이지는 강재의 물리적인 변화량을 측정하기 위해 주로 이용되는 F-Type(FLG-1-23) Series를 사용하였고 본 게이지를 통해 저항치 변화(𝛥r)를 측정한 후 다음 식을 이용하여 이형강재의 변형률(𝜀)은 산정하였다.
| $$\begin{array}{l}\mathrm\Epsilon=\frac{\mathit\triangle\mathrm r}{\mathrm K\cdot\mathrm R}\\\;\end{array}$$ | (37) |
식 (37)에서 K와 R은 각각 게이지상수와 저항치를 나타내며 본 실험시에는 각각 K=2.0, R=120(𝛺)을 적용하였다.
한편 FT-2(N) 시험앵커는 최대인발하중을 예측하기 위한 것으로 변형률게이지 미부착 조건이며 각 인발하중에 상응하는 축변위 만을 측정하였다.
Fig. 8은 FT-1(S) 시험앵커와 FT-2(N) 시험앵커의 인발시험의 전경을 나타낸 것이다.

3.2 현장 지반조건 및 그라우트 조건
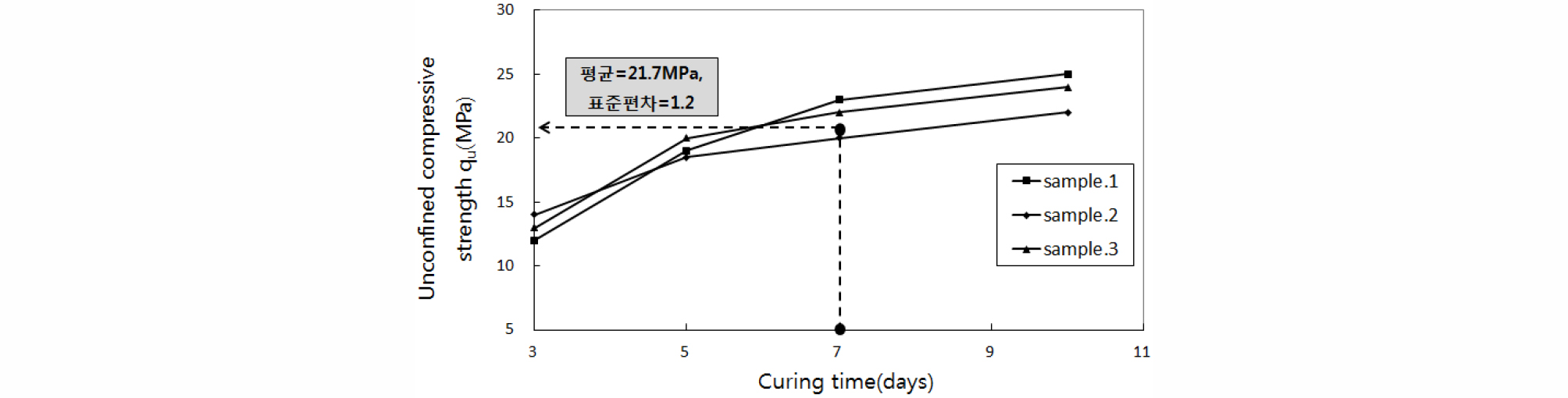
시험 현장의 지반조건은 지표면 상부로부터 약 3.2m까지는 매립층이 존재하고 이하 4.7m심도까지는 모래 및 자갈로 구성된 퇴적층이 분포한다. 그리고 퇴적층 이하 11.7m 심도까지는 암편이 혼재된 실트질의 풍화토가 깊게 분포하고 있으며 이하 20.7m심도까지 풍화암층이 분포함을 확인함에 따라 본 현장의 풍화대가 비교적 깊게 분포함을 알 수 있다. 한편 시험 현장에서의 그라우트 강도는 재령기간별 실내압축강도 시험을 통해 확인하였으며 그라우트 강도가 20MPa 이상의 조건을 만족하는 재령기간을 고려하기 위해 보통포틀랜드 시멘트와 함께 별도의 혼화제를 사용하여 압축강도시험을 실시하였다. 이때 실험에 필요한 그라우트 강도는 지반강도 대비 비교적 크게 설정함으로써 앵커 인발시 그라우트의 선행 파괴가 발생하지 않도록 계획하였다. 즉 그라우트의 목표 압축강도는 20∼25.0MPa 범위로 계획하였으며 조성된 그라우트의 7일 강도는 Fig. 9에 나타낸 바와 같이 평균 21.0MPa로 분석됨에 따라 이를 목표강도로 설정하여 현장인발시험을 실시하였다. 현장 인발시험을 위한 시험앵커 및 계측기의 설치단면도는 Fig. 10에 나타내었다.
시험과정에서 각각의 하중재하 단계별로 변위를 측정하고자 하중고정-변위측정 방식을 적용하였고 이때 시험앵커의 인발하중은 1,000kN 규격의 유압 실린더와 1.5HP의 유압펌프를 이용하여 측정하였다. 또한 인발 작업중에 발생되는 변위는 TML사의 100mm LVDT를 이용하여 측정하였으며 측정자료는 TML사의 Data Logger를 이용하여 수집하였다.
인발시험시 앵커 인발로 인한 총 변위량(𝛿tot)은 인장 재하대 하부에 부착된 전자다이얼게이지(DG-2)를 이용하여 측정하였으며(Fig. 10 참조), 본 측정값을 이용하여 정착장에 발생하는 슬립은 앵커 탄성변위(𝛿e)와 함께 다음 식 (38)을 이용하여 산정하였다.
| $$\delta_\mathrm{tot}=\delta_\mathrm e+\delta_\mathrm s$$ | (38) |
여기서, 𝛿tot은 Fig. 10에 나타낸 바와 같이 자유장 두부에 설치된 다이얼게이지(DG-2)로 측정된 총변위량을 의미하며, 𝛿e는 자유장 두부(DG-2 설치위치)에서 자유장 끝단까지 비부착된 인장재(Lf=6.7m)의 탄성변위량을 나타낸다. 이때 탄성변위량은 식 (39)를 이용하여 산정하였다.
| $${\textit{δ}}_\mathrm e=\frac{\mathrm P\cdot{\mathrm L}_\mathrm f}{\mathrm E\cdot\mathrm A}$$ | (39) |
즉 각각의 앵커 인발하중(P)에 따른 총변위(𝛿tot)는 탄성변위(𝛿e)와 슬립(𝛿s)의 합으로 정의되므로 이를 통해 슬립(𝛿s)는 식 (38)로 부터 산정할 수 있다.
3.3 현장 인발시험 결과
Fig. 11과 Fig. 12는 인발성능시험을 준용하여 각각 FT-1(S) 앵커와 FT-2(N)앵커의 인발시험 결과를 나타낸 것이다. 여기서 Fig. 11은 FT-1(S)와 FT-2(N) 조건에 대한 인발시험성과에 대한 관계도를 나타낸 것으로 그림에 나타낸 바와 같이 시험결과가 인장재의 탄성곡선(점선)보다 하단에 분포하며 각 인발하중에 따른 탄성변위와 슬립이 발생함을 나타내고 있다. 이때 슬립은 앵커 인장시 측정된 총변위에서 인장재의 탄성변위를 감하여 산정하였다(식 (38) 참조). 검토 결과 FT-1(S)의 경우는 8단계 하중조건에서 최대인발하중 P8=Pmax=666.9kN이 발생하였으며 이에 대한 탄성변위(𝛿e)는 41.7mm, 이에 따른 슬립(𝛿s)은 10.8mm로 측정되었다. FT-2(N)의 경우도 8단계 하중조건에서 최대인발하중 P8=Pm=656.3kN이 발생하였으며 이에 대한 탄성변위(𝛿e)는 41.0mm, 이에 따른 슬립(𝛿s)은 11.0mm로 측정됨에 따라 시험결과는 상호 유사하게 나타났다.
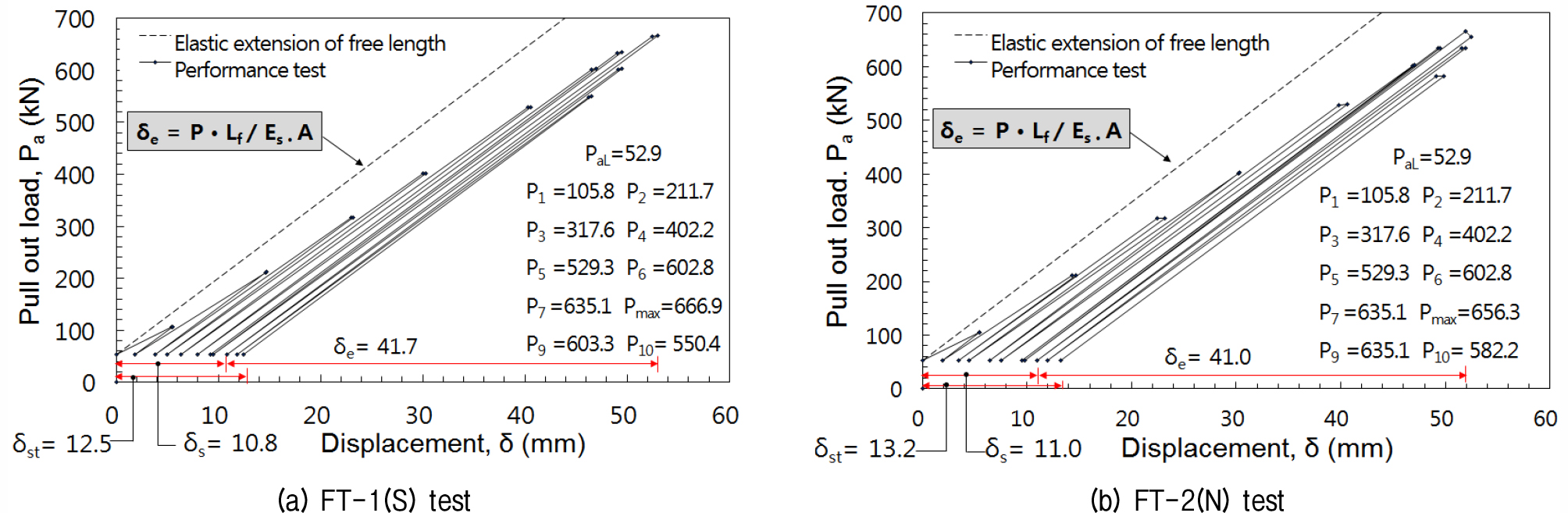
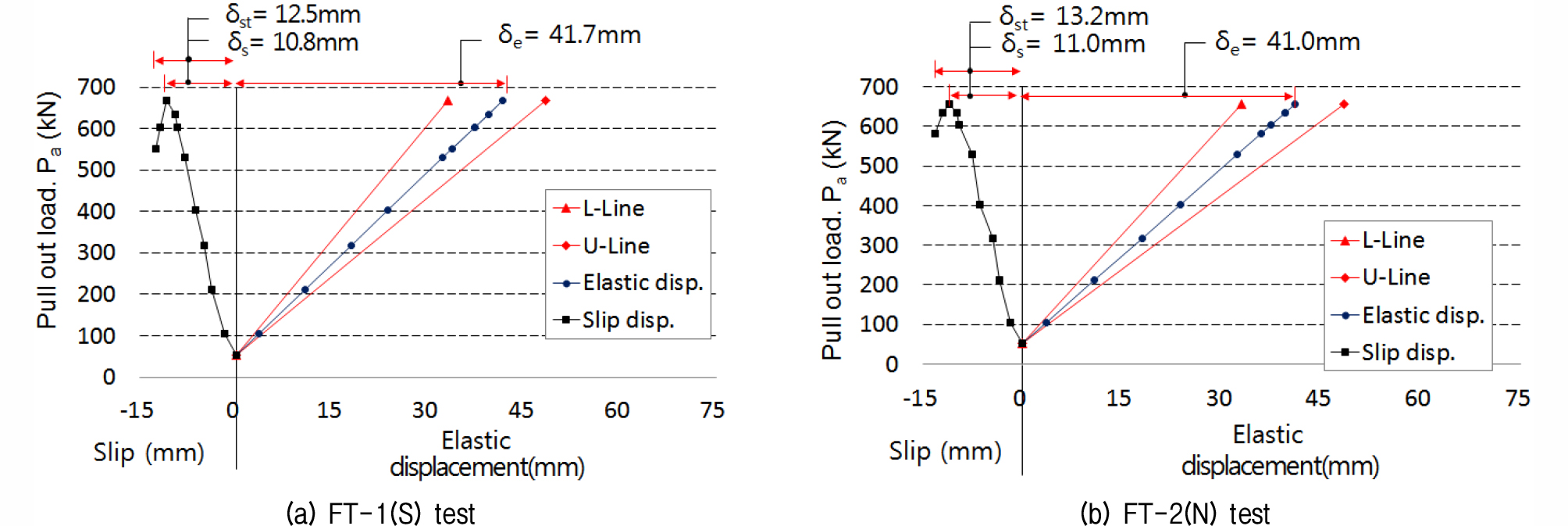
Fig. 12는 인장형 앵커의 탄성변위량 관리기준인 U-line (탄성변위 상한선)과 L-line(탄성변위 하한선)을 이용하여 앵커 인발에 따른 변위관계를 나타낸 것이다. 여기서 U-line과 L-line은 각각 식 (40)과 식 (41)을 이용하였다(FHWA, 1999; PTI, 2004).
| $$\mathrm L-\mathrm{line}\;:\;\mathrm\delta\geq\frac{\left({\mathrm P}_\mathrm j-{\mathrm P}_\mathrm{al}\right)0.9{\mathrm L}_\mathrm f}{{\mathrm E}_\mathrm s\;{\mathrm A}_\mathrm s}$$ | (41) |
여기서 Pj는 각 하중단계별 잭킹(jacking)하중을 나타낸다.
검토결과 Fig. 12에 나타낸 바와 같이 자유장부의 탄성변위는 U-line과 L-line의 범위내 분포함에 따라 측정된 탄성변위는 신장량 관리기준에 부합하는 것으로 나타났다.
한편 8단계 인발하중 (P8=656.3∼666.9kN) 이후부터는 인발하중이 급격히 감소하면서 슬립이 증가함을 확인할 수 있는데 이는 사실상 8단계 인발하중이 최대인발하중(Pmax)임을 나타내는 것으로 Pmax이후부터는 앵커가 점차 인발되는 단계임을 나타낸다.
3.4 해석모델 및 해석기법의 제안
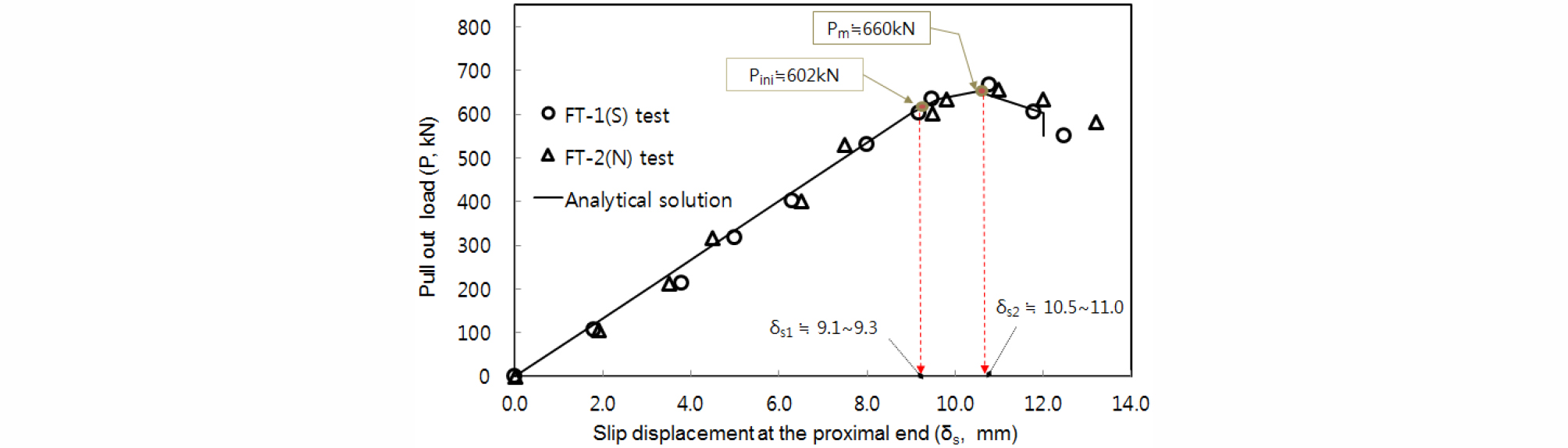
본 절에서는 현장시험결과에 근거하여 다중선형모델의 수식적 표현을 제시하고 이를 이용하는 해석적 기법을 제안하고자 한다. 현장시험을 통해 측정된 P-𝛿s관계에 부합하는 조건의 지반조건을 고려하였는데 정착장 주변의 지반이 풍화토 조건인 관계로 이를 감안하여 극한주면전단응력(𝜏u)는 FHWA(1999) 기준과 PTI(2004) 기준을 참조하여 𝜏u=500kPa로 설정하였다. 또한 초기임계하중(Pini≒602kN)에 해당하는 슬립을 1차 임계슬립(𝛿c1)으로 정의한다면(Fig. 15 참조) 이때의 𝛿c1값은 다중선형모델의 𝛿s1값과 같게 된다. 즉 현장인발시험시 측정된 슬립(𝛿s1=9.1∼9.3mm)에 근거하여 𝛿s1=9.0mm을 적용하였다. 그리고 잔류전단응력(𝜏r)과 2차 슬립(𝛿s2) 값은 현장시험에 의한 P-𝛿s관계와 다중선형모델을 이용한 P-𝛿s관계가 거의 일치할 때까지 시행착오법(trial & error)으로 산정하였다.
Fig. 13은 현장 인발시험성과(P-𝛿s관계)에 부합되는 다중선형모델의 각 변수들을 결정하기 위한 흐름도를 나타낸 것이다. 본 흐름도에 기반하여 결정된 다중선형모델의 각 정수값은 Table 3에 나타내었고 이에 대한 도식적 관계는 Fig. 14에 나타내었다.
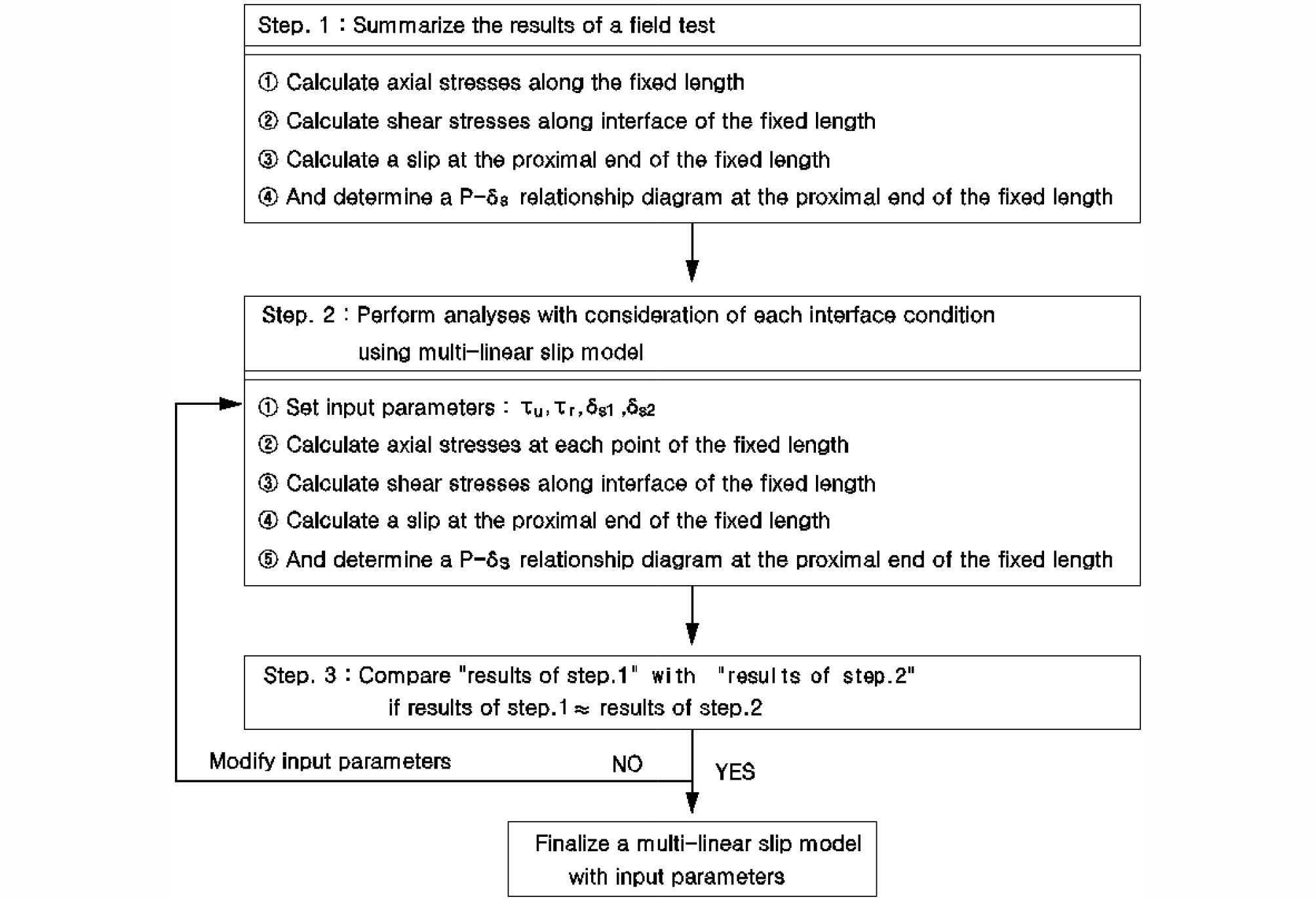
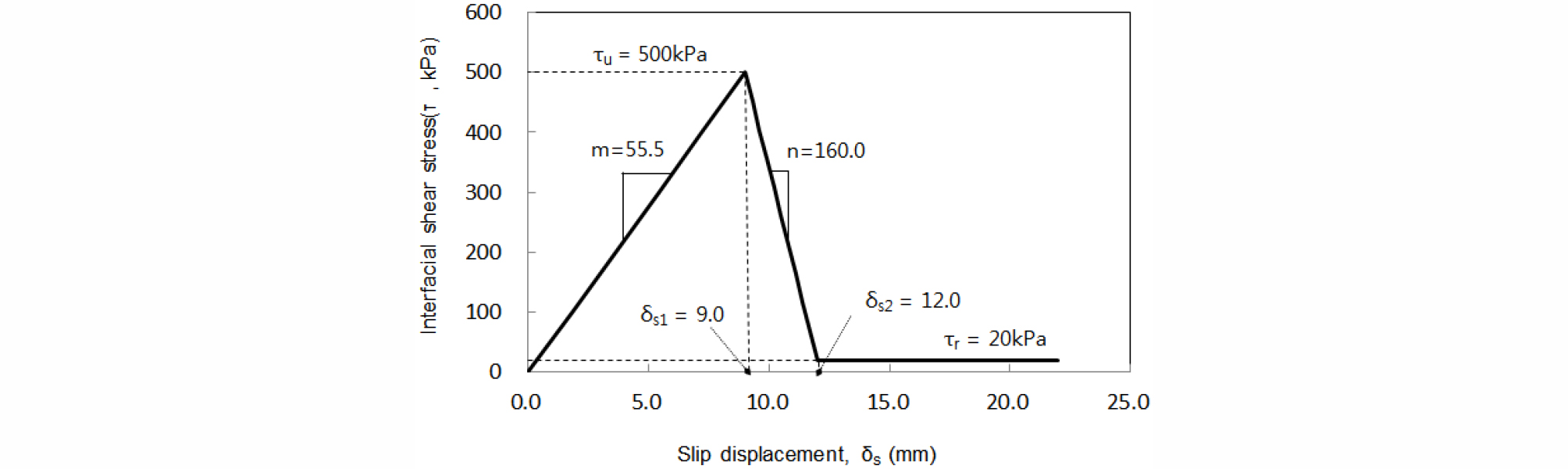
Table 3. Values for set up of multi-linear model with FT-1(S) and FT-2(N) test results
| Shear stiffness and slip condition | Shear stiffness parameter | |||||
| 𝜏u (kPa) | 𝜏r (kPa) | 𝛿s1 (mm) | 𝛿s2 (mm) | m (MN/m3) | n (MN/m3) | h (MN/m2) |
| 500 | 20 | 9.0 | 12.0 | 55.5 | 160.0 | 1.9 |
Fig. 15는 인발시험결과와 다중선형모델을 이용한 해석결과를 인발하중(P)과 슬립(𝛿s) 관계로 나타낸 것이다. 여기서 P-𝛿s 관계는 크게 3가지 특성으로 나타남을 알 수 있다. 즉 초기임계하중(Pini)까지는 P-𝛿s 관계가 비교적 큰 기울기의 선형적 관계를 보이며, 이후 Pini부터 최대인발하중(Pmax)까지는 비교적 완만한 기울기로 인발하중이 증가함을 나타내고 있다. 이때 Pmax가 발생하는 슬립을 2차 임계슬립(𝛿c2)으로 정의한다면 𝛿c2≒10.5∼11.0mm로 나타남에 따라 실험적 결과와 해석적 결과는 비교적 유사함을 보여준다. 또한 인발시험시 Pmax= 656.3kN∼666.9kN으로 측정되었으며 해석적 방법에 의한 Pmax≒660kN 정도를 나타냄에 따라 실험적 결과와 해석적 결과가 상호 유사함을 알 수 있다. 마지막 3단계는 Pmax 이후부터 슬립이 증가하면서 동시에 인발하중이 급속하게 감소되는 단계를 나타낸다. 이러한 감소특성은 Pmax 이후부터 정착장의 뽑힘과 함께 인발하중이 점차 정착장 끝부분으로 전이되는 현상에 따른 것으로 판단된다. 또한 Pmax가 발생하는 2차 임계슬립(𝛿c2≒10.5∼11.0mm)은 다중선형모델의 𝛿s1~𝛿s2의 범위(9.0∼12.0mm)(Fig. 14 참조)에 해당하는 것으로 보아 Pmax는 선형탄성-연화거동 조건에서 발생한다는 가정이 적절하였음을 판단할 수 있다. 종합해 보면 3가지 경계면 특성을 고려한 P-𝛿s 관계의 해석적 결과가 실험적 결과와 비교적 유사하게 나타남에 따라 가정된 다중선형모델(𝜏-𝛿s) 관계와 수식적 표현, 본 연구에서 제안된 해석기법은 적절하였음을 확인할 수 있다.
한편 FT-1(S)조건의 시험앵커는 정착장 내부에 변형률계를 부착하여 각각의 인발하중 조건에 대한 정착장 길이방향의 축력 분포를 측정하였는데 이를 해석적 검토결과와 비교하였다. 이때 인발하중 적용 조건은 작용순서별로 P1=105.9kN → P3=317.6kN → P5=529.3kN → P6=602.8kN → P8(Pmax)=666.9kN → P9=603.3kN 으로 적용하였으며 이에 대한 결과를 Fig. 16에 나타내었다.
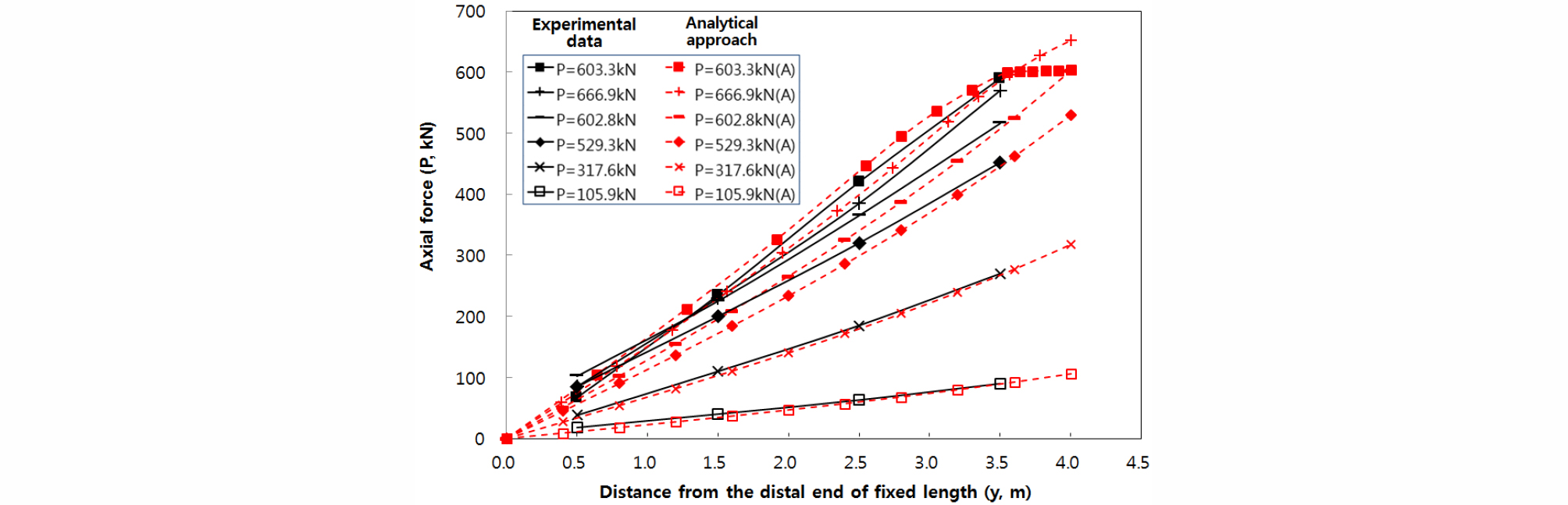
각 인발하중 적용에 따른 축력분포는 실험적 결과와 해석적 검토 결과가 비교적 유사함을 나타낸다. 즉 정착장 시작점에서 끝단으로 갈수록 선형적으로 감소하는 경향이 대체로 동일함을 보인다. 또한 인발하중이 작을수록 다소 완만한 경사로 축력이 분포하는 반면 인발하중이 클수록 끝단부로 갈수록 급격히 축하중이 감소하는 경향을 나타낸다. 특히 P9=603.3kN조건에서는 y≒3.0m지점에서의 축력이 P8(Pmax)=666.9kN 하중조건에서 보다 크게 나타나는 경향을 보인다. 이러한 특징은 Pmax이후의 하중조건에서는 정착장 시작점부터 슬립이 발생함에 따른 것으로 판단된다. 즉 정착장 시작점부터 끝점 방향으로 하중전이가 발생함에 따라 P9=603.3kN조건에서는 Pmax조건 대비 y≒3.0m지점에서의 축력이 크게 나타난 것으로 판단된다. 즉 Pmax이후의 하중조건에서는 축하중이 정착장 끝점방향으로 전이됨을 의미한다.
Fig. 17은 Fig. 16에 나타낸 축력 분포 값을 이용하여 정착장 주면전단응력을 비교, 검토한 것이다. 이때 각 위치별 전단응력은 정착장 각 절점간의 작용하중과 식 (42)를 이용하여 산정하였으며 여기서, i점과 i+1점은 Fig. 10에 나타낸 바와 같이 각 변형률계의 위치를 나타낸다.
| $$\tau\mathrm i,\mathrm i+1=\frac{{\mathrm P}_\mathrm i-{\mathrm P}_{\mathrm i+1}}{\mathrm\pi\cdot{\mathrm D}_{\mathrm i,\mathrm i+1}\cdot{\mathrm L}_{\mathrm i,\mathrm i+1}}$$ | (42) |
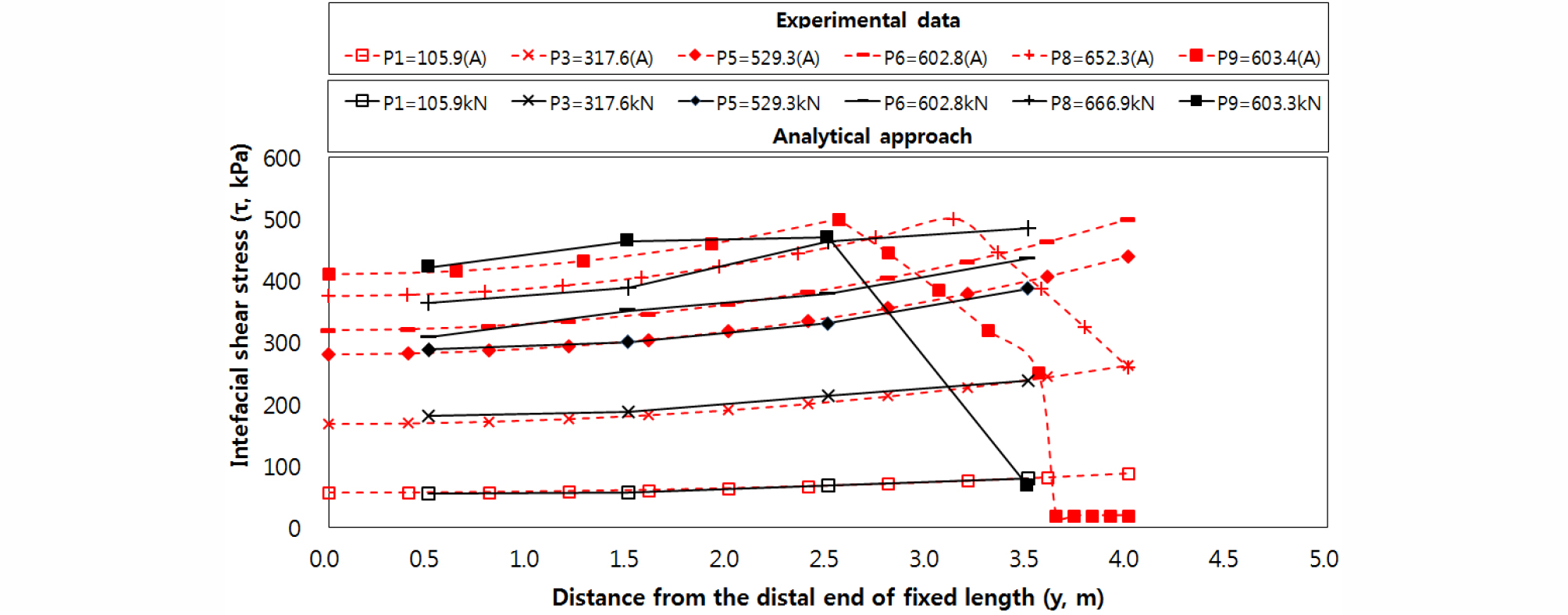
Fig. 17의 분석결과 인발하중이 작을수록 정착장 전장에 걸쳐 전단응력은 비교적 작고 또한 상대적으로 균일한 분포를 보인다. 그러나 인발하중이 점차 증가하여 P8(Pmax)에서는 정착장 시작점에서 슬립발생으로 인하여 전단응력은 최소값을 나타내며 최대전단응력(𝜏u)은 정착장 시작점에서 다소 이격된 지점에서 발생함을 보이고 있다. 이후 P9조건은 P8(Pmax)이후의 하중조건으로서 최대전단응력(𝜏u) 발현지점이 점차 정착장 끝단쪽으로 전이됨을 나타내고 있다. 즉 P9조건은 정착장이 더욱 더 인발된 상태임을 나타낸다. 이 경우 본 연구 제안 해석기법에 의한 해석결과는 실험결과와 상당히 유사한 결과를 나타내고 있음을 볼 수 있다.
이상의 결과를 종합해 보면 해석적으로 검토된 인발하중(P)-슬립(𝛿s) 관계에 근거하여 본 연구에서 제안한 해석기법을 적용할 경우 각 인발하중(P) 조건별로 검토된 축력 및 전단응력 분포가 실험값과 대체로 유사하게 나타남을 알 수 있다. 따라서 다중선형모델 및 이의 수식적 표현, 이를 적용하는 해석기법의 적용성 및 유효성을 확인할 수 있다.
4. 결 론
풍화토에 정착된 인장형 앵커를 대상으로 현장인발시험을 수행한 후 이를 기반으로 정착장의 주면전단거동을 분석할 수 있는 해석적 모델의 수식적 표현을 통한 해석기법을 제안하였으며, 현장 인발시험결과와 해석적 기법을 적용한 결과를 비교, 분석함으로써 해석적 모델의 적용성 및 유효성을 검토하였다. 본 연구결과 도출된 결론은 다음과 같다.
(1) 풍화토 정착조건의 인장형 앵커를 대상으로 인발하중(P)-슬립(𝛿s)의 관계에 대한 시험결과를 근거로 본 연구에서 제안한 다중선형모델의 해석기법의 적용성과 유효성을 확인하였다. 정착장 길이방향으로의 축력 분포와 주면전단응력 분포를 검토한 결과, 해석적 결과는 현장시험결과와 비교적 유사함을 알 수 있었다. 즉 제시된 다중선형모델을 이용한다면 풍화토 정착조건의 인장형 앵커에 대한 인발거동특성을 비교적 용이하게 분석할 수 있을 것으로 판단된다.
(2) 인발시험을 통해 최대인발하중(Pmax) 이후부터는 인발하중이 감소하면서 슬립(slip)이 증가함을 확인하였다.
(3) 정착장의 축력 분포는 인발하중이 작은 경우 정착장 전장에 걸쳐 비교적 작은 값으로 거의 일정하게 분포하나 인발하중이 점차 증가할수록 정착장 시작점에 축력이 집중되고 동시에 정착장 끝단부로 갈수록 축력이 점차 감소하는 경향을 확인하였다.
(4) 정착장 길이별로 주면전단응력분포는 축력 분포 특성과 유사하게 인발하중이 작을수록 비교적 작은 값으로 정착장에 거의 균등하게 분포하였다. 그러나 인발하중이 증가하여 최대인발하중(Pmax) 이후부터는 정착장 시작점의 전단응력이 가장 작게 발현되고 정착장 시작점에서 일정거리 이격된 지점에서 최대전단응력이 발생함을 확인하였다. 이는 정착장의 축방향 인발변위에 따른 것으로 판단된다.
(5) 본 논문은 풍화토 지반조건의 제한된 인발시험 성과를 활용한 결과로써, 향후 다양한 지반조건과 여러 형태의 앵커형식별로 인발성능시험이 수행된다면 정착장의 거동을 비교적 쉽게 예측할 수 있는 다중선형모델의 데이터 구축이 가능할 것으로 판단되며, 향후 이에 대한 추가적인 연구가 수행되기를 기대한다.
